机器人极简史:从周朝跳舞机器人到波士顿动力狗

2015年全球有多达163万台工业机器人在运行,并且这一数字每年都在稳步增长。机器人最早可以追溯到古希腊,中国在周穆王时期就有跳舞机器人的传说。一文看懂机器人的历史。
几个世纪以来,机器人一直迷恋人类的思想:从古代石人的故事到现代科幻小说,无一不是。
虽然“机器人”(robot)一词在1921年才由Karel Čapek正式引入,但人类早在公元前4世纪就致力于创建自动机器。
今天,机器人广泛应用于各种行业。根据国际机器人联合会的统计,2015年全球有多达163万台工业机器人在运行,并且这一数字每年都在稳步增长。
以下是机器人技术从公元前400年的早期想象发展成为现在全球重要资源的简要历史。
古代的机器人:Archytas的鸽子,Ctesibius的Clepsydra
机器人最早可以追溯到古希腊。 亚里士多德是最早考虑自动化工具以及这些工具如何影响整个社会的伟大思想家之一。
在公元前400年,第一台自动机器是由Tarentum的Archytas设计的,他今天被认为是数学力学之父。 Archytas的鸽子是一款蒸汽动力自动飞行器。
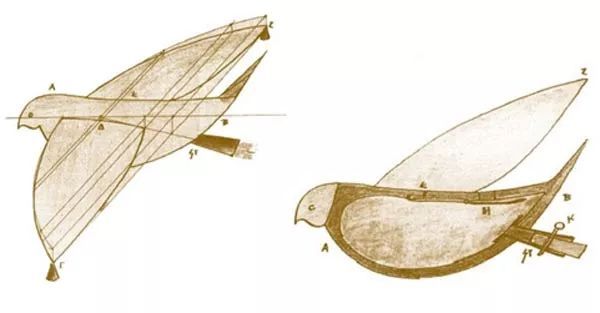
它的木质结构是根据鸽子的解剖结构设计的,里面装有一个密封的锅炉,用于生产蒸汽。蒸汽的压力最终会超过结构的阻力,使得机器鸟可以飞行。
在公元前250年,Ctesibius创造了一个漏壶(clepsydra)或叫水钟,它有许多精密的自动装置。尽管世界各地的水钟已经使用了几个世纪,但正是在这段时间里,希腊和罗马的发明家开始更新钟表的基本设计,如钟、锣和移动的小雕像等。
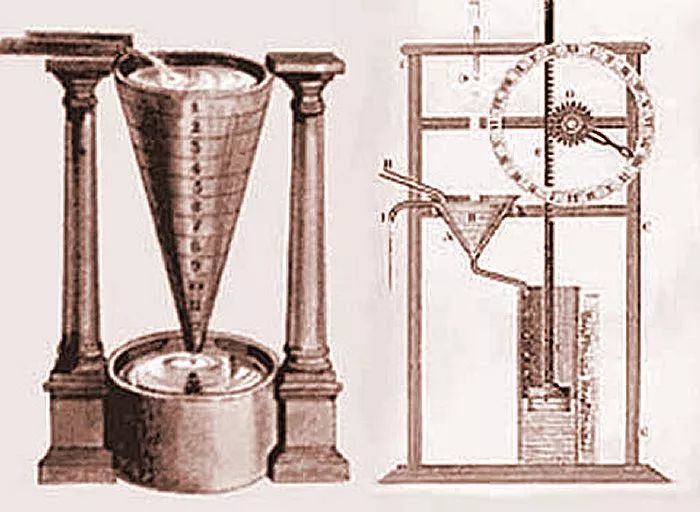
clepsydra
Ctesibius的设计允许将指针触碰到响亮的锣上,这就诞生了第一个闹钟,并成为早期自动机设计的一个例子。
不只是那些正在尝试机器人技术的古希腊人和罗马人。有关中国古代自动机的记载也很多,就像公元前3世纪《列子》中的一段话,描述了一个为周穆王表演唱歌和歌舞的机器人。

为周穆王跳舞的机器人
根据文字记载,这个机器人是由一位名叫Yen Shih(偃师)的发明家用木材和皮革制造的。
11世纪到15世纪:人形机器人和达芬奇的骑士
自主技术的发展一直持续到11世纪以及世界各地。这一时期最重要的发明家之一是Ismail al-Jazari,他是伊斯兰教黄金时代的工程师和数学家。 Al Jazari被认为创造分段齿轮,并被许多人认为是机器人之父。他的许多机器人作品都是由水驱动的,包括从自动门到可以续杯的人形自主女服务员。
在达芬奇的后期工作中,受Al Jazari的影响尤其明显。在1495年,这位意大利著名艺术家和画家设计了一个自主骑士,其中设有一系列滑轮和齿轮,使其能够移动其胳膊和下巴,还能坐起来。

达芬奇自己对人体解剖学的研究应用到人形机器人上,达芬奇的金主米兰公爵Lodovico Sforza将其用作聚会的娱乐对象。
16世纪到18世纪:飞行机器人和音乐机器人
主要为娱乐目的而设计的机器人在16世纪和18世纪之间变得更加流行。尽管这些机器人是为娱乐而设计的,但重要的是不要轻率地对待它们的设计。这些设备中使用的许多技术为后来更复杂的机器人铺平了道路。
鹰
其中一种是由德国数学家Johannes Müllervon Königsberg(又名Regiomontanus)所制造的。除了在1530年代的某个时候,大家知道它是由木头和铁制成的,目前还没有人知道它是如何制造的。
1708年,作家John Wilkins写了一篇关于“机器鹰”的文章,声称它是飞向普鲁士皇帝,并返回Regiomontanus。
Regiomontanus也被认为创造了一种能够飞行的机器人。
这一时期另一个关键人物是Jacques de Vaucanson。1737年,Vaucanson创作了长笛演奏者,这是一个真人大小的类人机器人,可以演奏长笛上的12首不同的歌曲。该机器人使用一系列波纹管“呼吸”,并有一个移动的嘴和舌,可以改变气流,使其能够演奏乐器。
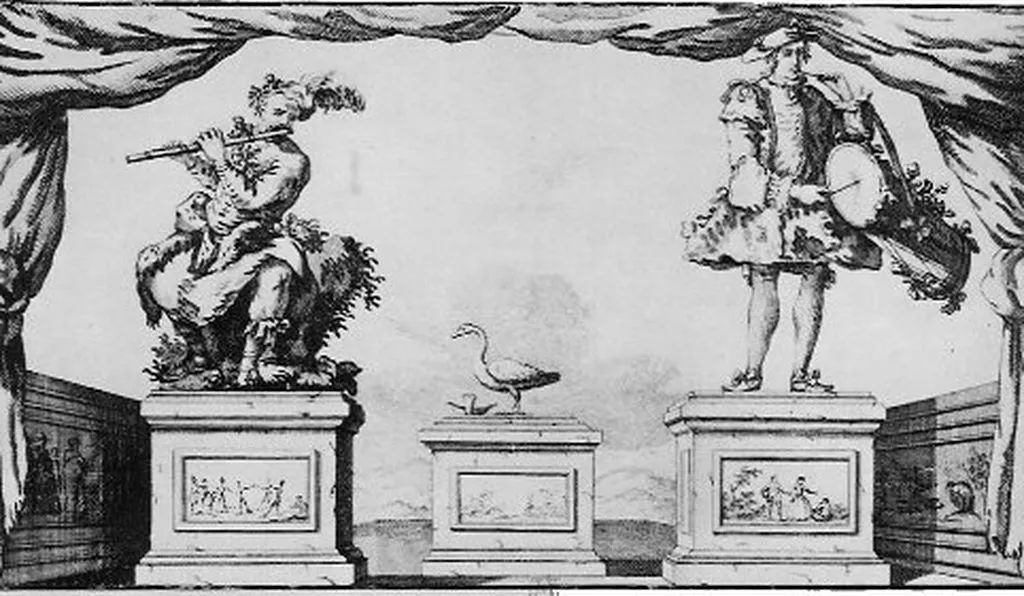
Vaucanson创作的长笛演奏者、觅食鸭子和锤鼓者
然而,Vaucanson最令人难忘的成就是他的觅食鸭(Digesting Duck)。这只鸭子之所以引人注目,是因为它不仅能吃,还能拉(下蛋),而且它也常常被认为是利用橡皮管的第一个装置。
Digesting Duck
十九世纪:棋类机器人和早期的语言实验
19世纪,自动机器人成为旅游景点和某种怪异的东西,它让全世界的观众着迷和鼓舞。
当时流行的一种机器人是棋类机器人。这些作品中最有名的是The Turk,由Wolfgang von Kempelen在十七世纪七十年代建造,并且在1854年巡回展出。虽然它看起来好像是机器人可以下棋,但这台设备被曝光是一个由藏在盒子里的棋手操纵的骗局。
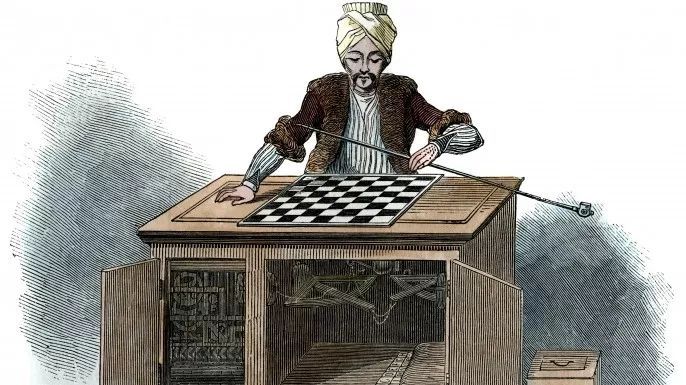
1845年,刊载于“伦敦新闻报”上的The Turk插图
尽管The Turk是个骗局,但它的中心思想为真正的国际象棋机器人提供了灵感,它们将在20世纪初登上历史舞台。
然而,19世纪的另一台非凡的机器不是骗局——“Euphonia”。它是一种会说话的机器人,它是通过一种早期的文本到语音技术进行操作的。Euphonia是由奥地利数学家和发明家oseph Faber创造的。
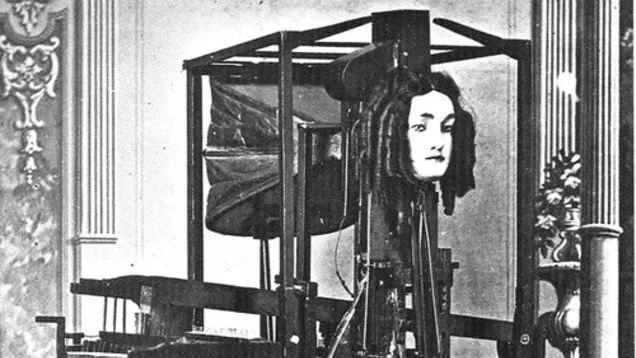
Euphonia
这台机器的特点是,有一个与键盘相连的人形女性脸,面部的嘴唇、下巴和舌头可以被控制。一根风箱和一根象牙白的芦苇提供了机器的声音,音调和口音可以通过鼻子上的螺丝来改变。
这台机器是Faber 25年工作的巅峰,并于1846年首次向观众展示。可悲的是,维多利亚时代的观众对这部机器茫然的眼神和毛骨悚然的声音感到不安,随后这台机器就被遗忘。
20世纪早期:El Ajedrecista, Eric和Gakutensoku
当The Turk被揭露为骗子的时候,20世纪初,第一个真正的象棋机器人诞生了。在1912年由Leonardo Torres y Quevedo建造的El Ajedrecista(直接翻译为“棋手”)是第一个真正的国际象棋机器人,它被一些人认为是视频游戏的先驱。

El Ajedrecista
该装置能够和人对弈,通过电路和一个磁铁系统来移动棋子。它在1914年的巴黎世界博览会上首次亮相,引起了极大的轰动和赞誉。
1928年,英国第一个机器人Eric问世。Eric是由工程师和一位一战老兵共同创造的,它由两个人操作,可以移动头部和手臂,并通过无线电信号进行通话。它的动作由一系列齿轮、绳索和滑轮控制,据报道,机器人能从嘴里喷出火花。

Eric
作为向Karel Čapek在1921年创作的剧作Rossumovi Univerzalni Roboti致敬,字母R.U.R.被刻到了Eric的胸部。
第二年,日本第一个机器人Gakutensoku首次亮相。Gakutensoku由生物学家Nishimura于1929年建造,身高超过7英尺(2.1米),可以通过齿轮和弹簧的运动来改变面部表情。
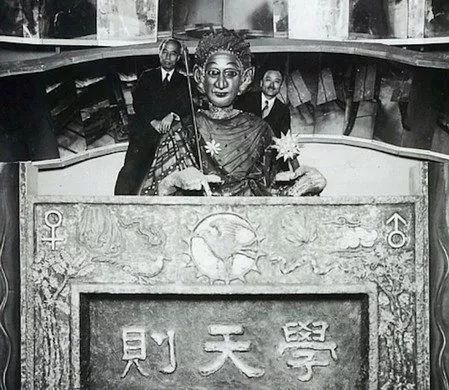
Gakutensoku
然而,Gakutensoku最伟大的成就是它书写汉字的能力。不幸的是,这个机器人在德国巡演时失踪了。
20世纪40年代:Asimov机器人定律和第一个人工神经网络
20世纪20年代,“robot”一词被引入,但直到Isaac Asimov在1942年的短篇小说Runaround问世后,才出现了“robotics”这个词。
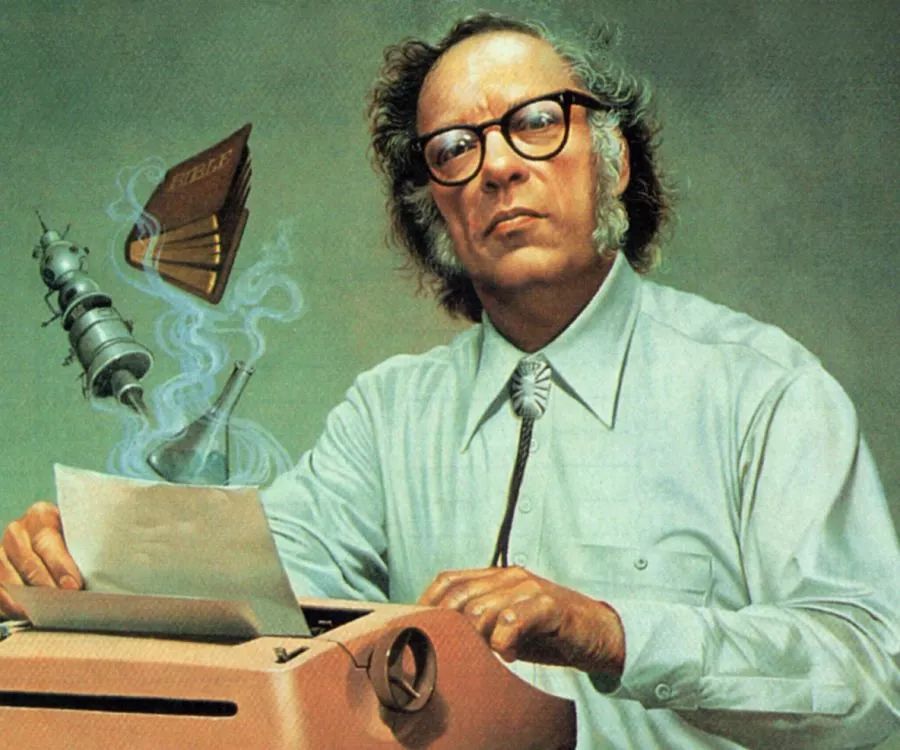
Isaac Asimov
机器人三定律
在小说中,Asimov列出了他著名的——机器人不能伤害人类,他们必须服从人类的命令,而且他们必须保护自己免受威胁,前提是他们的自我保护不会违反前两项法律。尽管这些定律是虚构的,但这些定律为许多围绕机器人和自主技术的伦理问题提供了基础,时至今日仍被提及。
第一个人工神经网络
20世纪40年代也出现了。1943年,Warren McCulloch 和 Walter Pitts创建了一个使用电路的基本神经网络,以更好地理解神经元是如何在大脑中运作的。由于使用了人工神经网络,他们的实验为第一个能够显示复杂行为的自主机器人铺平了道路。
在1948年和1949年,William Grey Walter创造了两个这样的机器人——Elmer 和 Elsie。
这两个昵称为“乌龟”的机器人可以对光线做出反应,并在电池电量不足的情况下,引导自己到充电站。
20世纪50年代:图灵测试和Unimate
机器人历史上的另一个里程碑时刻发生在1950年,当时阿兰·图灵概述了他对机器人工智能的测试。图灵测试已经成为人工智能的基准,因为它可以测量机器的智能与人类的智能相同还是无法区分的程度。以最简单的形式,测试的目的是确定机器是否可以思考。他的工作为1956年达特茅斯学院建立人工智能提供了必要的框架。
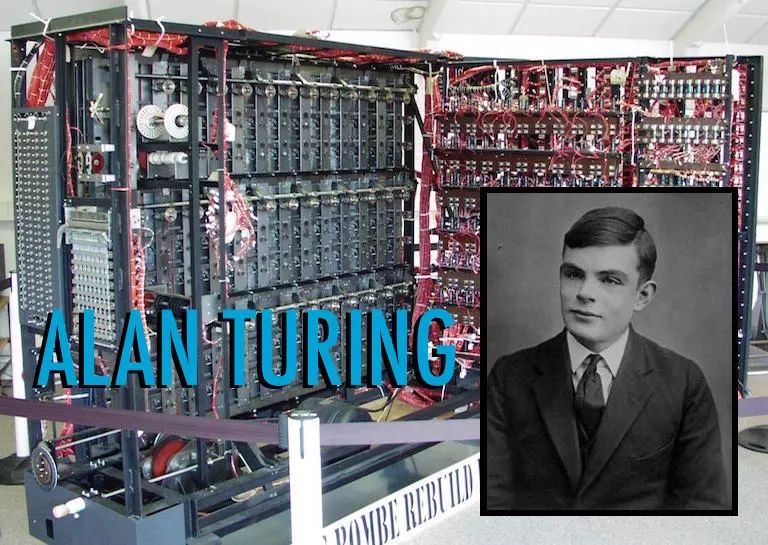
阿兰·图灵
20世纪50年代还出现了第一个工业机器人——Unimate。Unimate的专利是由George Devol在1954年提出的,它的特点是一个机械手臂能够运送压铸件并将其焊接到位。
Unimate
这种革命性的装置将永远改变制造业的面貌。
20世纪60年代:工业机器人革命
1961年Devol获得Unimate专利后,机器人在工业环境中的应用进展迅速。同年,通用汽车公司在其位于新泽西州的装配线上安装了Unimate。通用汽车在Unimate上获得成功后,于1966年进入全面生产。
20世纪60年代,Devol的机器人工业部门的核心理念出现了许多创新和扩展。1968年,麻省理工学院人工智能实验室的联合创始人Marvin Minsky发明了一种“触手臂”——一个由液压装置驱动的12节机械手臂,可以通过操纵杆进行控制。Minsky的机器人触手臂很容易就能绕过障碍物。他的研究为今天出现的许多软机器人技术创新铺平了道路。
1969年,Victor Scheinman发明了斯坦福机械臂,这是一个机器人手臂,被认为是最早由电脑控制的机器人之一。

斯坦福机械臂
这是一个巨大的突破,就像当时用磁鼓操作Unimate一样。它包含六个关节点,完全由斯坦福大学人工智能实验室完成。虽然主要用于教育目的,但斯坦福手臂标志着可通过计算机控制的工业机器的重大突破。
20世纪70年代:WABOT-1、工业创新和太空机器人
20世纪70年代初,世界上第一个全面拟人化机器人——WABOT-1问世。WABOT-1是1967年WABOT的后续行动,由东京早稻田大学的加藤一郎(Ichiro Kato)创立。
WABOT-1
WABOT-1有一个视觉和肢体控制系统,可以自行导航和自由移动,它甚至可以测量物体之间的距离。它的手具有触觉传感器,这意味着它能抓住和运输物体。它的智力与18个月大的人类相当,标志着人形机器人技术的重大突破。
上世纪70年代还见证了工业机器人技术的发展。1973年,德国库卡(KUKA)公司发布了“FAMULUS”——这是第一个拥有6个机电驱动轴的工业机器人。第二年,Richard Hohn开发了第一台由小型计算机提供动力的工业计算机——The Tomorrow Tool(T3)。
1978年,SCARA(the Selective Compliance Assembly Robotic Arm)被创造出来,它由山梨大学(University of Yamanashi )教授Hiroshi Makino开发,手臂可以沿4轴移动,并在80年代早期成为装配线上的常见设备。

SCARA
第一批登陆火星的机器人是维京1号和维京2号,它们于1976年登陆火星。
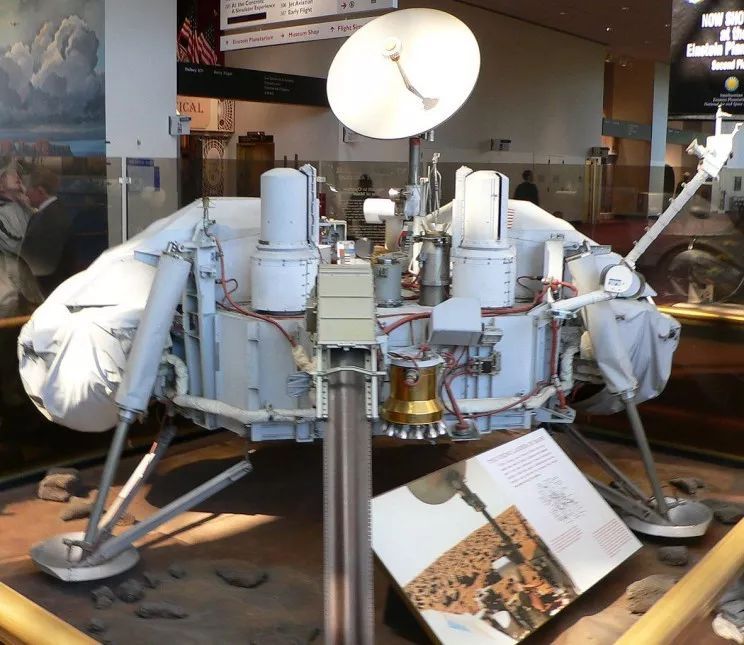
这两个机器人都是由放射性同位素热电供电,这些发电机通过衰变钚释放的热量产生能量。尽管这两个登陆器收集的数据很模糊,但它们是我们今天所知的火星探测器的官方先行者。
20世纪80年代:家庭机器人、加拿大的臂膀和Genghis。
在20世纪80年代,机器人正式进入了主流消费市场,尽管大多是简单的玩具。
其中最受欢迎的机器人玩具是《Omnibot 2000》。Omnibot 2000是遥控的,并配有一个托盘用来供应饮料和零食。

Omnibot 2000
这一时期另一个备受追捧的机器人玩具是任天堂的R.O.B。R.O.B.作为任天堂娱乐系统的一款机器人播放器被推向市场。它可以对6个不同的命令做出响应,这些指令通过CRT屏幕上的闪光灯进行通信。
80年代,工业机器人领域出现了进一步的发展,福特在世界各地的生产线上增加了数百个机器人。福特嘉年华因其由机器人注入防腐密封剂而备受瞩目。
随着1981年哥伦比亚号航天飞机发射Canadarm,机器人在80年代也继续它们的旅程。加拿大制造的机械臂长50英尺(15.2米),有6个连接点。它可以由控制站的一名机组成员控制,在服役期间成功执行了90次任务。
1989年麻省理工学院研究人员制造的六足机器人Genghis,通常被认为是现代历史上最重要的机器人之一。
Genghis
由于其体积小,材料便宜,Genghis被认为缩短了未来空间机器人设计的生产时间和成本。它由12个伺服电机和22个传感器组成,可以穿越岩石地形。
20世纪90年代:Cyberknife,Sojourner和爱宝
20世纪90年代初,机器人进入手术室,使用Cyberknife:一种可以手术治疗肿瘤的放射手术系统。 Cyberknife由斯坦福大学神经学教授John R. Adler开发,是一种非侵入性的手术工具,可以跟踪和瞄准肿瘤,聚焦辐射束较窄。到2010年,Cyberknife在斯坦福癌症中心所有治疗中占有5%的份额。
1996年,Sojourner成为第一个被送往火星的火星车。这个小型的轻型机器人由探路者号带到火星,并于1997年7月成功着陆火星表面。
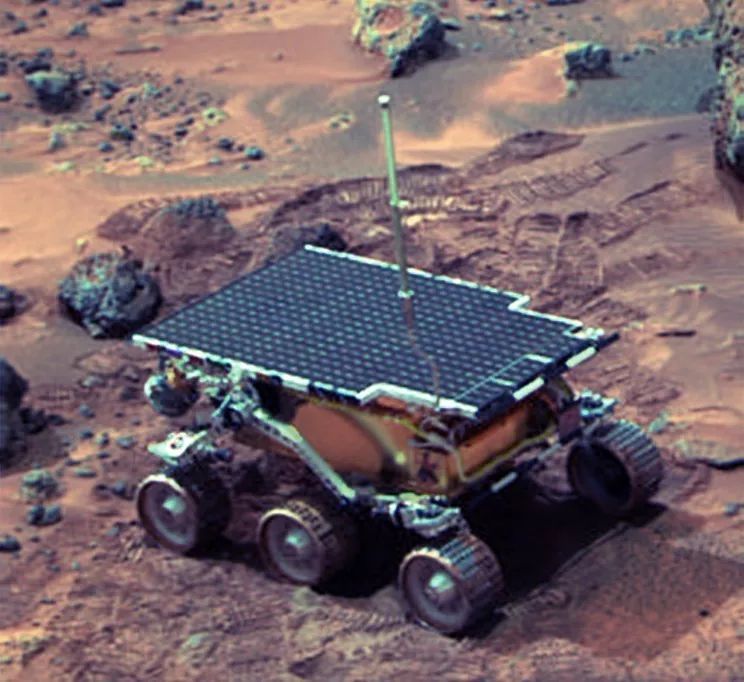
Sojourner
在火星期间,Sojourner探索了2691平方英尺(250平方米)的土地,并拍摄了550张图片。基于Sojourner收集的信息,科学家们确定火星曾经有一个温暖潮湿的气候。这次任务标志着美国宇航局更多的火星探测器的开始。
90年代末,出现了20世纪最具标志性的机器人之一——索尼的爱宝(AIBO)机器狗。AIBO于1999年发布,是首批进入消费者市场的机器宠物之一。AIBO可以对语音指令做出回应。

今年早些时候,索尼为21世纪市场推出了一款全新的改装AIBO,该款产品配有两个摄像头和空间映射功能。
21世纪:今天的机器人状态
虽然我们距离本世纪仅有18年,但机器人技术已经取得了诸多进展,并形成了我们的技术格局。现在许多家庭都有自己的roomba机器人吸尘器,它可以自动清洁地板。我们已经看到了无人机在从军队到家庭运输等各个领域的应用等等
在过去的几年里,有许多具有里程碑意义的创新。然而,在讨论近年来机器人的成就时,尤其要注意的是两个机器人——索菲亚和波士顿动力狗。

去年,索菲娅成为第一个获得国家公民身份的机器人——这个由Hanson Robotics公司开发的Android机器人于2017年10月获得沙特阿拉伯公民身份。在接下来的一个月里,她成为第一位非人类女性担任的联合国开发计划署创新大使。索菲娅的人工智能是基于云的,她能够深度学习,可以识别和复制各种各样的人类面部表情。
在现代机器人技术的引领下,波士顿动力公司一直被媒体视为在引领潮流,这要归功于它们的自主创新。
其中最著名的是“波士顿动力狗”(Big Dog),它在2005年推出时吸引了全世界的关注。它最初是设计成一个军用机器人,其身上安装了50个传感器,能够承载340磅(150公斤)的重量,能以每小时4英里(6.4千米/小时)的速度奔跑。

最近,波士顿动力公司又公布了另外两款吸引眼球的机器人——SpotMini和Atlas。SpotMini是一种自主机器人狗,它可以自己打开门,而Atlas是一个复杂的类人机器人,能够跑动和跳过障碍。
如果以波士顿动力公司为例子的话,那么在21世纪,机器人的创新几乎每周都会出现。机器人技术已经经历了一段漫长而又传奇的历史,看来我们还有很多值得期待的东西。
来源:InterestingEngineering


